
![월드컵까지 따냈다...스포츠산업 '생태계 파괴자' 된 빈살만[글로벌스트롱맨]](https://image.edaily.co.kr/images/Photo/files/NP/S/2023/11/PS23110500115t.jpg)

![[포토] 폭염 속 휴식취하는 건설 근로자](https://image.edaily.co.kr/images/Photo/files/NP/S/2023/08/PS23080100718t.jpg)

|
|
|

|

|

|

|
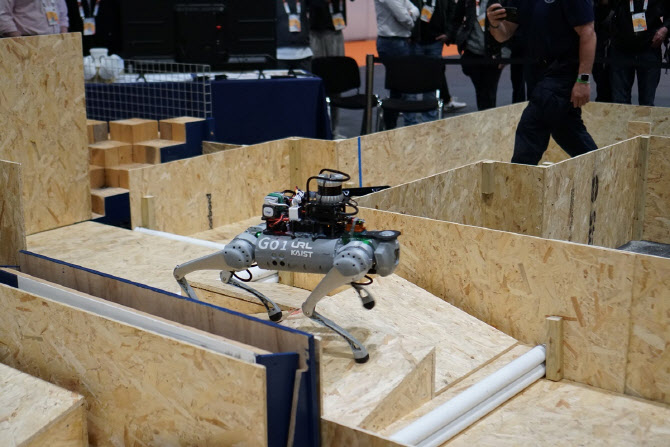
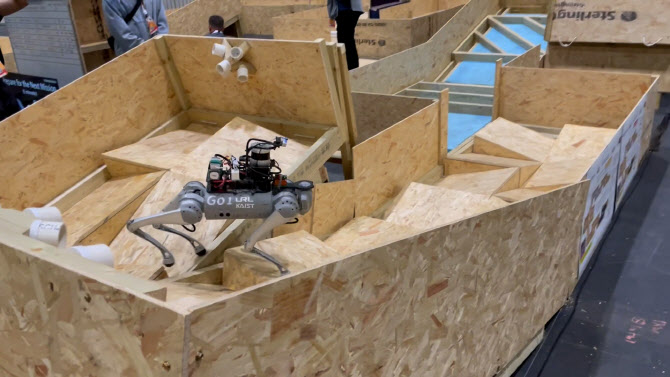
별도의 시각이나 촉각 센서 없이도 계단을 성큼성큼 오를 수 있는 보행로봇 제어기인 ‘드림워크(DreamWaQ)’를 장착한 KAIST 자율보행로봇이 국제 사족보행 로봇 경진대회에서 1등을 하는 쾌거를 이뤘다.
KAIST 전기및전자공학부 명현 교수 연구팀(미래도시 로봇 연구실)이 5월 29일부터 6월 2일까지 영국 런던에서 열린 2023 국제 로봇 및 자동화 학술대회(IEEE International Conference on Robotics and Automation, ICRA) 주최 ‘사족로봇 자율보행 경진대회(Quadruped Robot Challenge, QRC)’에서 6월 1일(현지시각) 압도적인 점수 차를 보이며 우승을 거둔 것이다.
MIT, CMU 큰 점수 차로 따돌려
KAIST 팀은 독자 개발한 단위 기술들을 체계적으로 통합하고 최적화한 자율보행 로봇으로 출전했다.
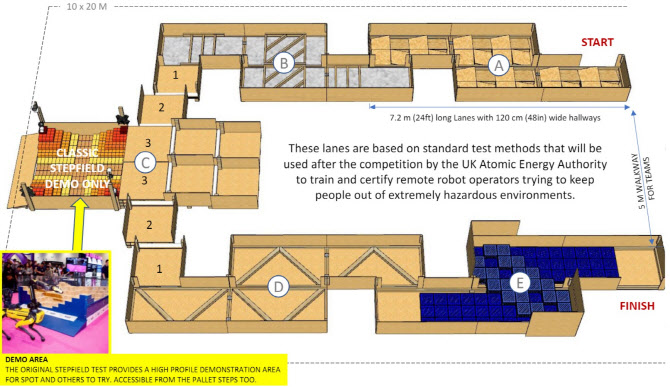
전 세계에서 한국을 포함한 미국, 홍콩, 이탈리아, 프랑스 등 총 11개 팀이 참여하고 7개의 팀이 본선에 진출했는데, 최종 6개의 팀이 참여한 결승전에서 총점 246점을 거둬 1위를 차지했다.
KAIST 팀은 소형 사족 보행 로봇을 사용했으나 가장 빠르게 움직이며 가장 높은 점수를 획득했다.
결승전에서 원격 수동 조작을 위주로 한 팀들이 평균 약 49분의 완주 시간을 기록한 반면, KAIST 팀은 자율 보행 위주로 41분 52초의 완주 시간을 기록했다.
2위 MIT는 원격조작으로 45분 32초 걸렸다.
우승한 KAIST 연구팀은 2,000만원 상당의 보행 로봇을 받았고, 약 300만원 상당의 보조금도 받게 된다.
로봇 자율보행기술 쾌거
통상 조종자는 기기 조작을 통해 로봇을 쉽게 조종할 수 있지만, 로봇이 가시거리를 벗어나면 별도의 통신을 통해 수신된 센서 정보를 이용해 로봇의 상태를 사람이 추측하며 로봇을 조종해야 한다.
하지만, 통신 지연이나 두절로 센서 정보 취득이 원활하지 못할 경우 제어가 어렵다.
KAIST팀은 이런 문제를 해결했다. 자율보행 기술을 통해서다.
자율보행 시스템을 구축하려면 제어기뿐 아니라, 로봇의 위치와 주변 환경을 추정하는 기술과 이동 경로를 계획하는 기술 개발도 필요하다. 이러한 여러 단위 기술 개발이 필수적이어서, 세계적으로도 완성도 높은 자율보행 기술을 확보한 연구팀은 손에 꼽힌다.
어떤 기술인데?
KAIST 연구팀은 다양한 환경에서의 자율보행을 위해 카메라, 3차원 라이다(LiDAR) 센서, 관성 센서(IMU), 관절 센서로부터 획득된 정보를 융합해 사용했다.
많은 센서를 사용했음에도 미니컴퓨터 하나에서 정확한 위치 추정뿐 아니라 주변 환경인지와 경로 계획까지 실시간으로 진행될 수 있도록 효율적인 시스템을 구축했다.
로봇 주변의 지형 지도를 작성하는 기술은 고가의 LiDAR 센서에만 의존하지 않고, 상대적으로 저렴한 깊이 카메라로 대체했다.
추정된 로봇 위치 주변 지형 지도를 빈틈없이 매끄럽게 작성하고, 이 지도를 활용해 안전한 지형을 스스로 판단해 보행할 수 있게 적합한 경로를 계획했다.
제어기 ‘드림워크’가 탑재된 로봇이 극복할 수 있는 최대 단차와 로봇의 크기를 고려하여 경로를 계획해 로봇이 넘어지는 상황을 최소화했다.
혹여 보행 중 넘어질 경우에도, 자동으로 일어나 임무를 수행할 수 있도록 하나 강화학습 기반의 재회복 (Fall recovery) 기술도 자체 개발해 탑재혔다.
KAIST팀의 명현교수는 “이번 경진대회에서 사용된 제어기인 드림워크 뿐 아니라, 로봇 주변의 환경을 인지하고 적절한 경로를 찾을 수 있도록 하는 기술은 모두 연구팀이 독자적으로 개발한 기술로 국내 로봇 산업 경쟁력 제고에 이바지할 것”이라고 기대했다.
KAIST DreamSTEP 팀의 구성원은 명현 교수 (지도교수), 유병호 박사과정 (팀장), 이 마데 아스윈 나렌드라(I Made Aswin Nahrendra) 박사과정, 김예은 박사과정, 오민호 박사과정, 마심 케빈 크리스티안센(Marsim Kevin Christiansen) 석박사통합과정, 이현우 박사과정, 이승재 석사과정, 이동규 석사과정이다.





![[포토]최은우 '선두가 보인다'](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900548t.jpg)
![[포토] 통합방위 발언하는 서강석 송파구청장](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900809t.jpg)
![[포토]청년도약계좌 22일부터 가입신청](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900757t.jpg)
![[포토] "의대 총장들 건의 수용한다"](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900703t.jpg)
![[포토] 학생들과 기념촬영하는 이재명](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900584t.jpg)
![[포토]김윤혜, 인형 그 자체](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900148t.jpg)
![[포토] 고군택 '이번주 우승은 제가 하겠습니다'](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900241t.jpg)


![[포토]유정복 인천시장 축사](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041800929t.jpg)
!['더 뉴 아이오닉5'…"디자인·편의성·승차감 다 좋아졌네"[타봤어요]](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24041900771t.jpg)
![[포토]송민교 '버디를 노려본다'](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/04/PS24042000015t.jpg)